Hello, world! I'm a developer and problem-solver.
=> "Taiwan (R.O.C)"
> Emily.education
=> "Carnegie Mellon University (Robotics Institute)"
> Emily.major
=> "Computer Science (Computer Vision)"
> Emily.expectedGraduation
=> "Dec. 2021"
> Emily.industrialExperience.current
=> company: "Facebook Reality Lab"
role: "Research Collaborator"
location: "Pittsburgh, PA"
duration: "Jan.2021 - Current"
> Emily.resume
=> "emilychwuu_cv_202105.pdf"
> Emily.interests
=> ["Code", "Coffee", "Aerial Photography", "Bridge"]
> Emily.thoughts
=> ["@linkedin", "@github", "@youtube"]
> Emily.email
=> "cwuu@andrew.cmu.edu"
Résumé
Education
 Carnegie Mellon University (Robotics Institute)
2020 - 2021
Carnegie Mellon University (Robotics Institute)
2020 - 2021
Computer Vision, M.S.
Pittsburgh, PA
 Hong Kong University of Science and Technology
2015 - 2020
Hong Kong University of Science and Technology
2015 - 2020
Computer Science, B.S. | First Class Honor
Business Management, B.B.A. | First Class Honor
Hong Kong, China
- Minor : Social Science & Big Data Technology
- Activities & Societies : Student Ambassador & HKUST Robotics Team
- Honors : Dean's List, University Scholarship, HKSAR Talent Development Scholarship, HKSAR Reaching Out Scholarship
 IESE Business School
2020
IESE Business School
2020
Enterpreneurship/ Entrepreneurial Studies
(Virtual) Barcelona, Spain
 Peking University
Fall 2018
Peking University
Fall 2018
Academic Exchange, Guanghua School of Management
Beijing, China
 ETH Zürich
Fall 2017
ETH Zürich
Fall 2017
Academic Exchange, Computer Science
Zürich, Switzerland
Industrial Experience
 Facebook Reality Lab
Jan. 2021 - Dec. 2021
Facebook Reality Lab
Jan. 2021 - Dec. 2021
Research Collaborator
Pittsburgh, PA
Investigated neural rendering models’interpolating capacity of viewpoint and expression on real-time face reconstruction.
OpenGLPyTorch3DNV-DiffrastVAENeural RenderingGit
 Tencent Youtu Lab
Jan. 2019 - Feb. 2019
Tencent Youtu Lab
Jan. 2019 - Feb. 2019
Software Engineering Intern
Shenzhen, China
Documented data collection rules for preserving data-balanced human detection dataset for localization algorithm training; Deployed YOLO3-based neural network model using PyTorch for human attribute localization on mobile devices
YOLO3PyTorchMobileNetObject Detection
 Da-Jiang Innovations
May 2018 - Sep. 2018
Da-Jiang Innovations
May 2018 - Sep. 2018
Software Engineering & Algorithm Intern
Shenzhen, China
Established a hierarchical and extendable robotics vehicles dataset (20k+ images) for training car detection system; Developed an AR live-stream car detection system with C & C++ for judging system in DJI’s 2019 RoboMaster Competition;
Applied neural network with YOLO3 as backbone and model compression via mobileNet, network pruning and model
quantization, achieving in 3x faster and 15x smaller compared to original working model
OPENCVYOLO3TensorFlowDarknetMobileNetObject DetectionNetwork PrunningModel Quantization
Awards
 Cyberport Creative Micro Fund Grant
2021
Cyberport Creative Micro Fund Grant
2021
Cyberport University Partnership Programme
Cyberport, Hong Kong
 Bronze
2020
Bronze
2020
Hong Kong ICT Awards: Student Innovation Award
OGCIO, Hong Kong
 Gold
2019
Gold
2019
FinTech Awards
ET Net
 4th Place
2016
4th Place
2016
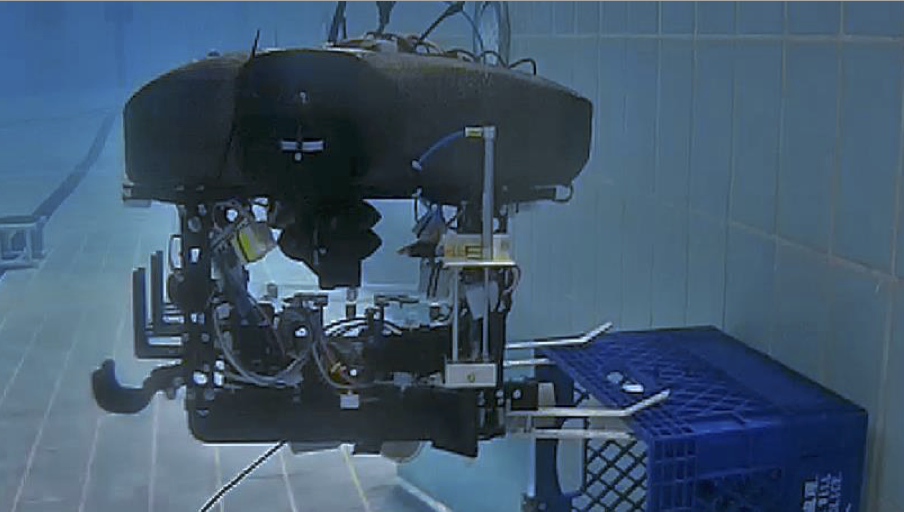
International MATE ROV Competition
NASA Robotics
 Champion
2016
Champion
2016
IET/MATE Hong Kong Underwater Robot Challenge
IET Hong Kong
Project

AR Teeth
Swift developer and Project Manager on building an Augmented Reality APP for aesthetic dentistry. This project will be deployed to dentist clinic to bridge the gap between the aesthetic perception of dentists and clients via displaying the real-time visual effect.
Expected to be released on Sep 2021
SwiftAR KitFigma

SIGMA
Gamified Financial Education & Risk Assessment App
Sigma is an award-winning APP in matching ready millennial clients with investment vehicles that best suit their risk preferences, predominantly focuses on gamification of client onboarding and financial intelligence & sentiment analysis.
Presentation Deck
Netify
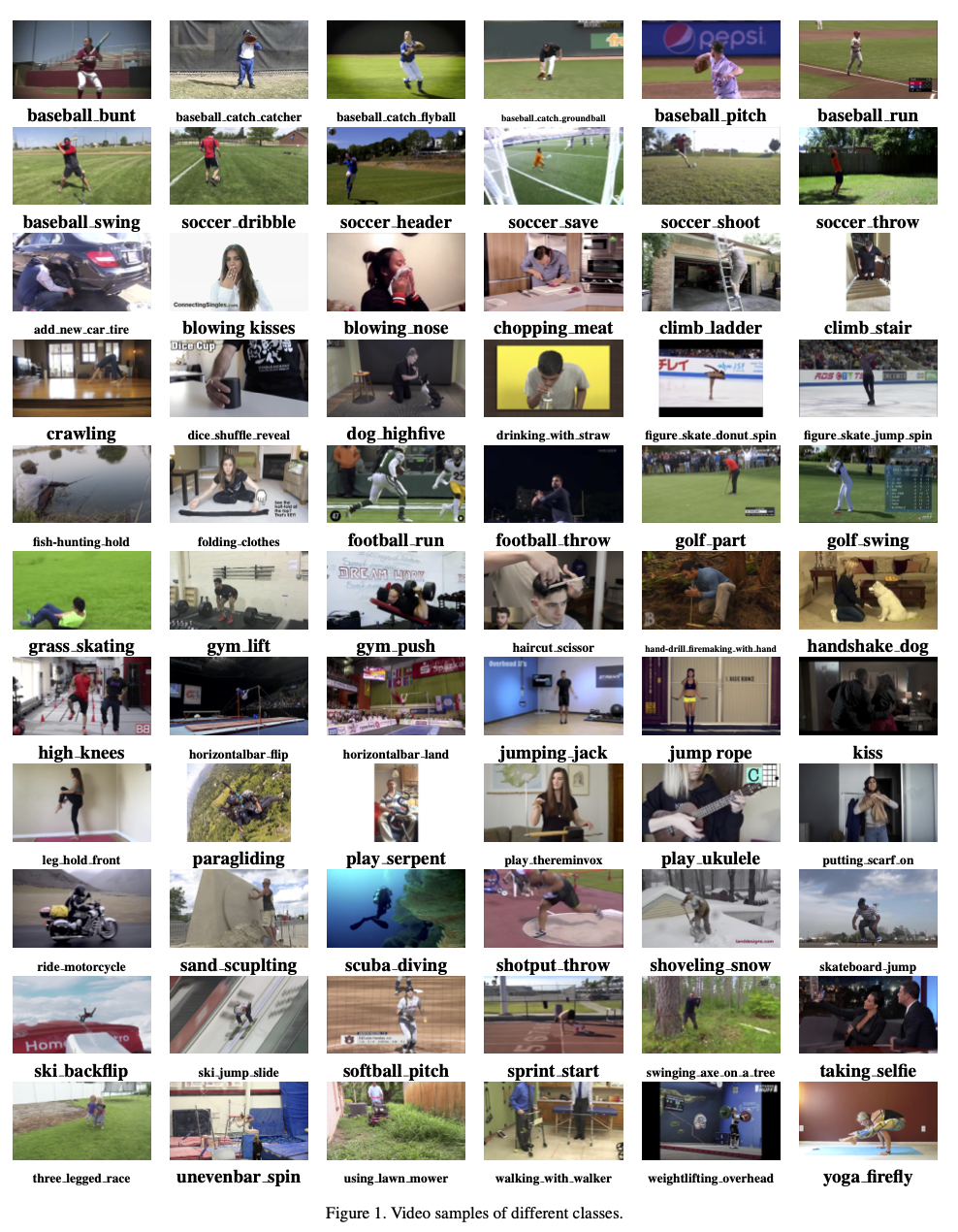
HAA500 (HKUST)
Human-Centric Atomic Action Dataset with Curated Videos
As an undergraduate researcher supervied by Prof. Chi-Keung Tang and Dr. Yu-Wing Tai Built a human-centric atomic action dataset including 500 fine-grained and hierarchical classes with JavaScript to mitigate issues of coarse class, noisy content and human occlusion for improving performance of action recognition in videos.
Paper | Dataset
Action RecognitionAtomic Action
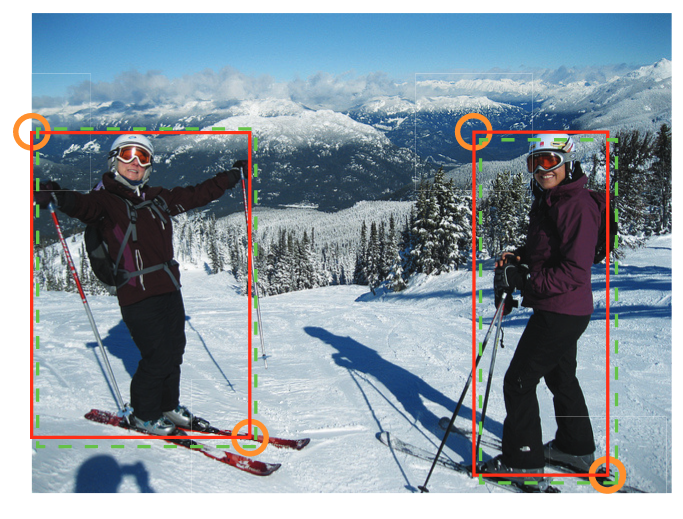
Anchor-free Object Detection (Princeton)
As an undergraduate researcher supervied by Prof. Jia Deng on establishing training and evaluation pipeline of CornerNet on Open Images dataset with PyTorch from scratch and applied data rebalancing and multi-stages zoom-in to handle data imbalance, crowded scenes, and non-exhaustive data labeling. Achieved best anchor-free detectors (mAP: 58.1%) in 2019 Open Images Challenge-Object Detection (ICCV)
CornerNetOpen ImagesOne-stage Detector
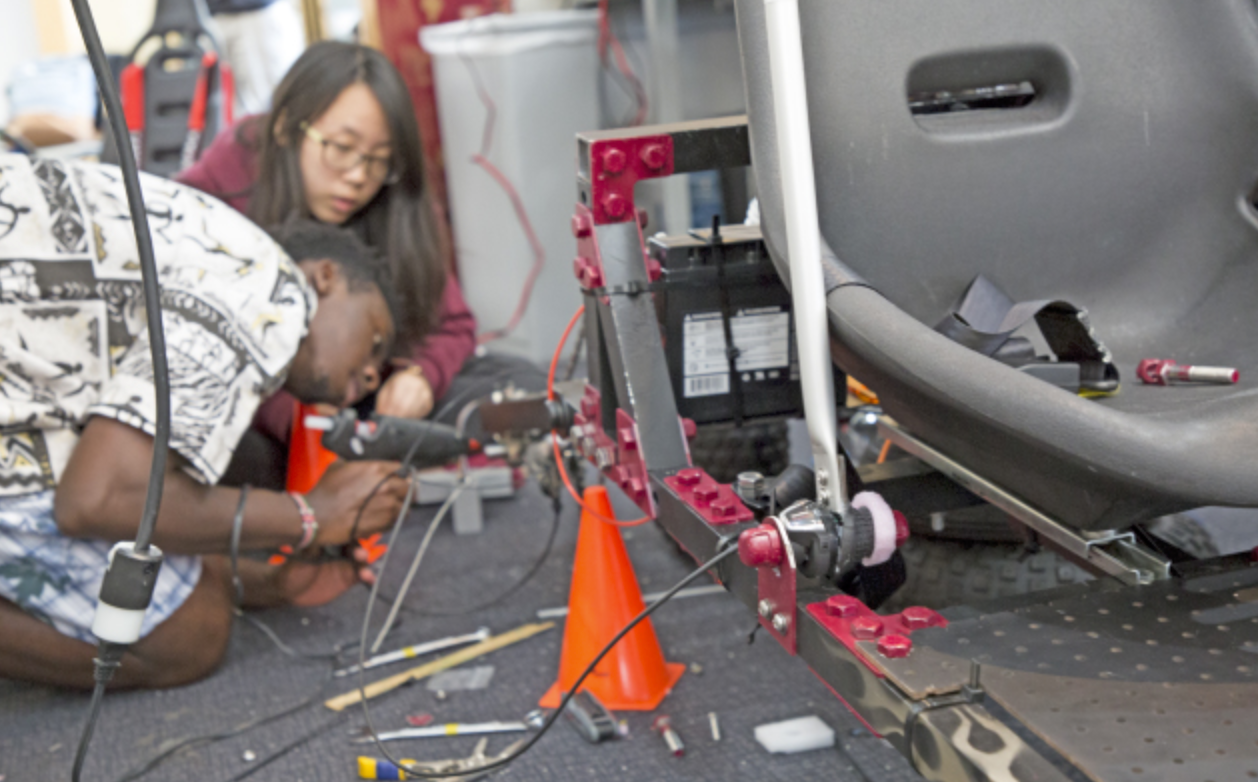
Automobiles and Electric Vehicle (Harvard)
As an undergraduate researcher supervied by Prof. Evelyn Hu, working on designing a simple electric circuit system and a car avoidance function using C++ for personal electric vehicles.
Press
PEVFusion 360